I don't know if you guys would find this interesting but I made a diy Koralia Controller. It's only a prototype, a bare system just enough to make a Koralia 12V nano spin.
A little bit of background, I'm a recent Electrical Engineering graduate. Some of my courses involved power electronics and advanced electromechanical systems.
When the Koralia system was launched a year back, I knew it's a project I want to work on. I had a thoery that these power heads had to be AC machines because of how low the price were compared to DC power heads like tunze. After searching the net, I have found no evidence of this. Some people where animate that these were DC while others were AC. Well, after numerous burnt chips, I can put those to rest and say that these are truly AC motors. I have proof.
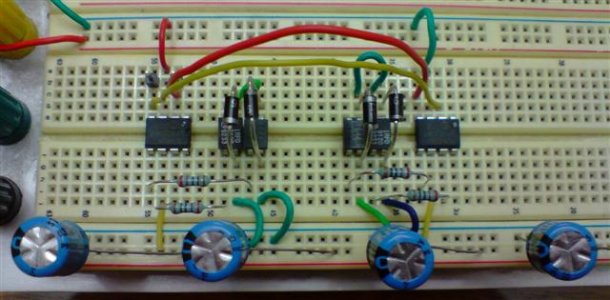
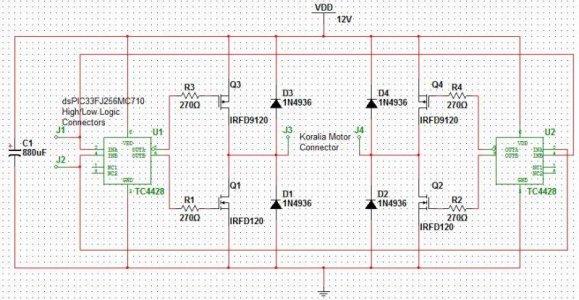
My design consists of a dsPIC33 MCU from Microchip and a simple H-bridge. The dsPIC33 is configured to provide a bipolar PWM gating signal for the H-bridge. I'm running a 10kHz carrier frequency with the AC output signal at 60Hz. I've included a picture of the circuit I used and the schematic for the H-bridge.
Click here for the video of the motor running
Please note though, that this is a proof of concept and by no means do I feel comfortable using it, as-is, for aquarium purposes. Hopefully the next one will be a bit better. If you have any questions, I'll try to answer them as best I can.
A little bit of background, I'm a recent Electrical Engineering graduate. Some of my courses involved power electronics and advanced electromechanical systems.
When the Koralia system was launched a year back, I knew it's a project I want to work on. I had a thoery that these power heads had to be AC machines because of how low the price were compared to DC power heads like tunze. After searching the net, I have found no evidence of this. Some people where animate that these were DC while others were AC. Well, after numerous burnt chips, I can put those to rest and say that these are truly AC motors. I have proof.
My design consists of a dsPIC33 MCU from Microchip and a simple H-bridge. The dsPIC33 is configured to provide a bipolar PWM gating signal for the H-bridge. I'm running a 10kHz carrier frequency with the AC output signal at 60Hz. I've included a picture of the circuit I used and the schematic for the H-bridge.
Click here for the video of the motor running
Please note though, that this is a proof of concept and by no means do I feel comfortable using it, as-is, for aquarium purposes. Hopefully the next one will be a bit better. If you have any questions, I'll try to answer them as best I can.